This file is part of the OpenJAUS HTML JAUS Reference.
Please support AS-4 JAUS and SAE by purchasing the corresponding Standard Document(s) from SAE International here.
|
This file is part of the OpenJAUS HTML JAUS Reference. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Home / Manipulator_v2_0ServiceSet / ManipulatorEndEffectorPoseSensor | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Inherits From: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 urn:jaus:jss:core:AccessControl v1.1 urn:jaus:jss:core:AccessControl v1.1
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
urn:jaus:jss:core:Events v1.1
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
urn:jaus:jss:core:Transport v1.0
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Internal Event Set | None |
|---|
| Message Set | |
|---|---|
| Message ID | Name |
2615h |
QueryEndEffectorPose |
4615h |
ReportEndEffectorPose |
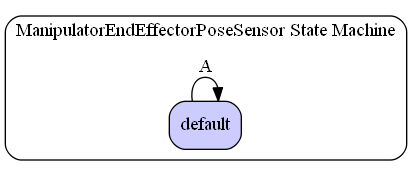
| State Transitions | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Label | Transition | Trigger | Conditional | Actions | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| A | ManipulatorEndEffectorPoseSensorDefaultLoop | QueryEndEffectorPose | |
sendReportEndEffectorPose | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Actions | |||
|---|---|---|---|
| Action Name | Type | Description | |
| sendReportEndEffectorPose | Send Action | Send a report end effector pose message
Output Message: ReportEndEffectorPose |
|
|
Copyright © SAE International. Reprinted with Permission. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Generated on 07/17/2019 from as6057a-manipulator.ojss | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||